EPJ E Highlight - Bacteria-inspired motility could power a new generation of mini-robots
- Details
- Published on 16 October 2018
Physicists develop a model to explain how deforming a helix could generate additional locomotion for some microorganisms and mini-robots
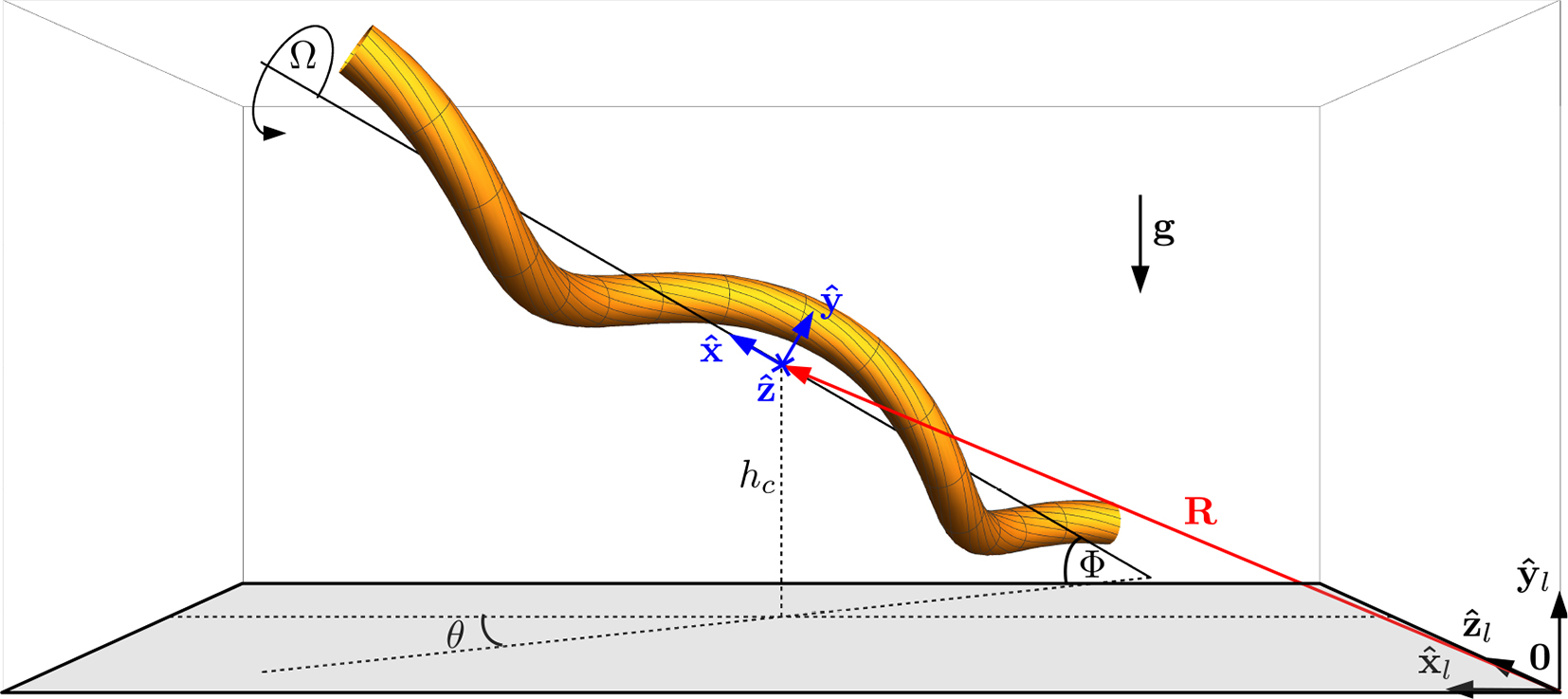
Many microorganisms rely on helices to move. For example, some bacteria rotate a helical tail, called a flagellar filament, for thrust and deform these tails during rotation. In addition, some types of bacteria, named Spirochaetes, rely on the deformation of a helical body for their motion. To better understand such locomotion mechanisms, scientists have created mathematical models of mini-robots with helical structures, referred to as swimmers. In a recent study published in EPJ E, Lyndon Koens from the University of Cambridge, UK, and colleagues, identify the factors enhancing the agility of deforming helix swimmers.
The authors examine what happens when these swimmers placed in a fluid uniformly change the radius, the helical pitch and the wavelength of the helix across their body. They identify swimming strokes that allow rotation and motion in a given direction and thus explain how the helix’s deformation influences the direction in which the swimmers move.
Koens and colleagues then explore what happens when helices have a small helix radius and identify which parameters affect the swimmers’ motion. In these configurations, it is possible to find solutions to equations explaining the motion. The authors find that swimmers only move in one dimension, namely in a direction perpendicular to the helix axis. They establish that the speed of swimmers is an odd function of the helix radius and could only generate displacement scaling as a function of the cubed helix radius.
The authors then consider the general optimisation of the swimmers’ agility, including the widening of the helix radius to gain increased movement and greater stability. Rotation is optimised when the tail is shortened along its axis, while displacements perpendicular to the axis of the tail are optimised when the tail is elongated along its axis.
Lastly, they look at the effect of walls, gravity, and defects in the centreline leading to breaks in helical symmetries. This may increase their speed, or even make them more agile by broadening the range of directions they can follow.
L. Koens, H. Zhang, M. Moeller, A. Mourran, and E. Lauga (2018),
The swimming of a deforming helix,
Eur. Phys. J. E, 2018, 41:119. DOI: 10.1140/epje/i2018-11728-2